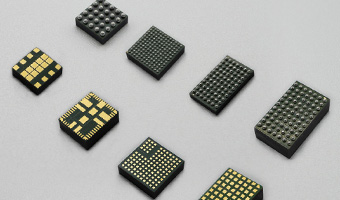
 Module de puissance magnétique intégré
Buck (Step-Down) -basse tension
Buck (Step-Down) -moyenne tension
Boost (Step-Up)
Modules de puissance DC-DC
Module de puissance magnétique intégré
Buck (Step-Down) -basse tension
Buck (Step-Down) -moyenne tension
Boost (Step-Up)
Modules de puissance DC-DC
 Module d’alimentation intégré magnétiquement (SiP)
Buck (Step-Down) — sorties multiples
Buck (Step-Down)
Boost (Step-Up)
Module d’alimentation intégré magnétiquement (SiP)
Buck (Step-Down) — sorties multiples
Buck (Step-Down)
Boost (Step-Up)
 Convertisseurs DC-DC personnalisés
Convertisseurs DC-DC personnalisés
Modules de puissance sur mesure: des Solutions de précision pour vos besoins uniques.
Contactez-nous dès aujourd’hui pour discuter de votre projet!
Encodeurs de moteur Servo incrémentiel
Encodeurs incrémentiels 35mm
Encodeurs incrémentiels 44mm
Encodeurs incrémentiels 48mm
Produits d’encodeur
Servomoteur encodeurs absolu
Encodeurs absolus 35mm
Encodeurs absolus 44mm
Encodeurs absolus 48mm
Encodeur absolu Bearingless
Codeur de moteur DC

Modules de puissance DC-DC
Convertisseurs DC-DC personnalisés Explorez les convertisseurs DC-DCProduits d’encodeur
Produits de capteurs
Produits de contrôle de fréquence
RZ35A09 servomoteur encodeur absolu
Détails détails
RZ35A08 servomoteur encodeur absolu
Détails détails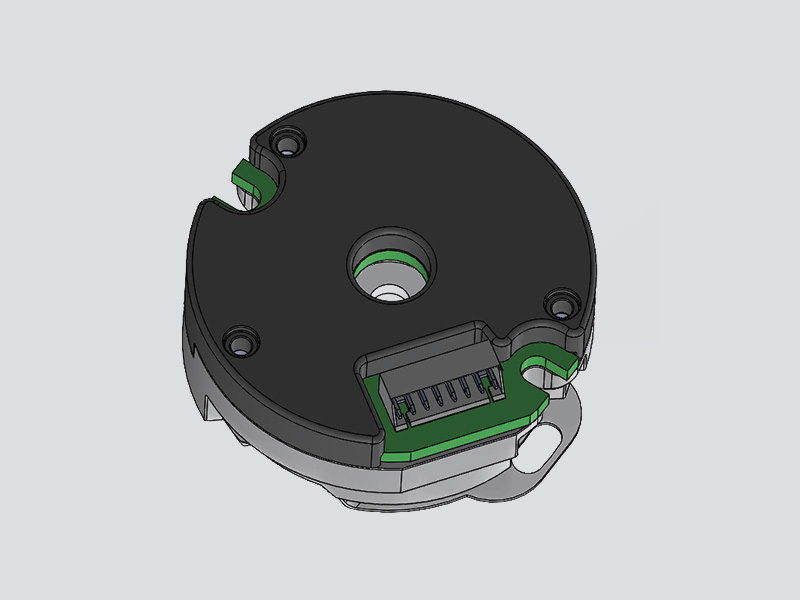
RZ35D06Q servomoteur encodeur absolu
Détails détails
RZ35D06S servomoteur encodeur absolu
Détails détails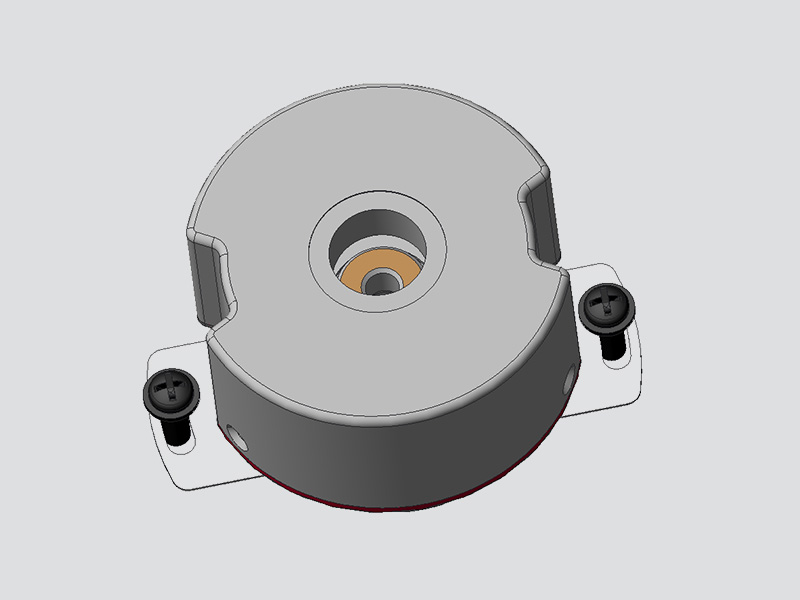
RZ4809A servomoteur encodeurs absolu
Détails détails
RZH4409A servomoteur encodeur absolu
Détails détails
RZL4409A servomoteur encodeur absolu
Détails détails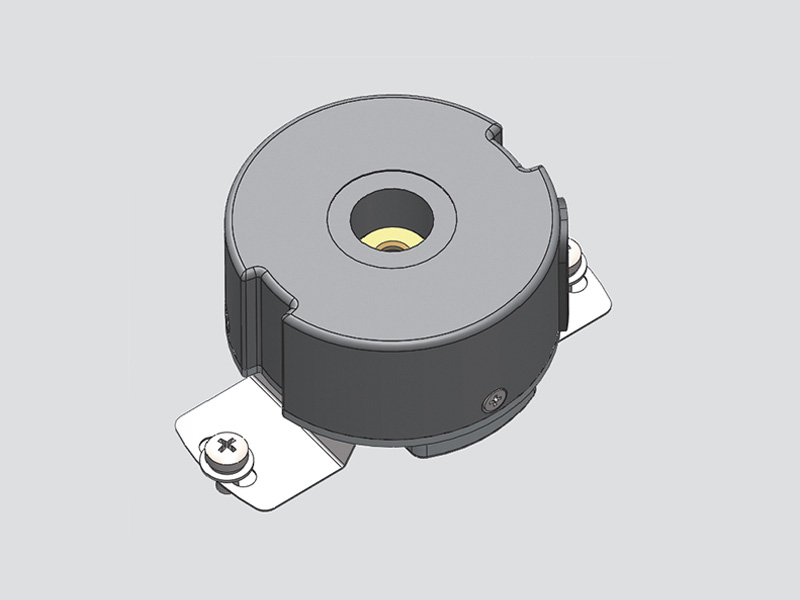
UZ4409 servomoteur encodeur incrémental
Détails détails
UZ4809 servomoteur encodeur incrémental
Détails détails
EJ Modbus capteur de déplacement de sortie
Détails détails
Capteur de déplacement magnétostrictif analogique EP
Détails détails
Capteur de déplacement magnétostrictif analogique MHA
Détails détails
Capteur de déplacement magnétostrictif de sortie RH(P) Profibus-DP
Détails détails
RZ35 série multi-tour roulement encodeur absolu
Détails détails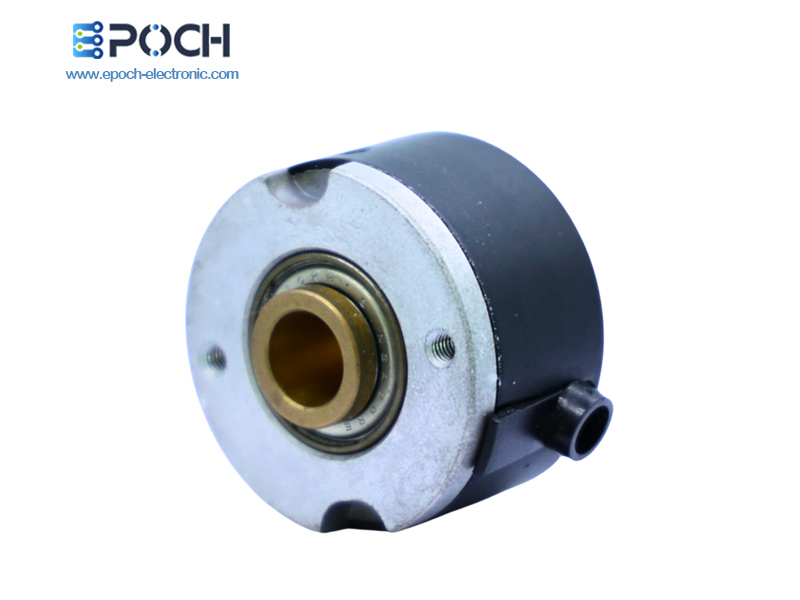
Série RZ35 portant l’interface absolue de codeur RS485
Détails détails
Encodeur rotatif réfléchissant Miniature de la série RF20 pour moteur DC
Détails détails
SMD7015 KHz cristal
Détails détails
LV7050 SPXO HCSL cristal oscillateur
Détails détailsLa température fonctionnante | -20°C à +105°C |
Consommation actuelle | < 100 mA |
Tension de la batterie | 3,6 V cc |
Tension de défaut de batterie | 2.5 V |
Tension d’avertissement de batterie | 3,1 V |
Le Le Signal | P Production différentielle |
Tension d’alimentation | Alimentation simple 5V |
Temps de montée/chute | Environ 100 ns |
Résistance isolée | 50 mω |
Plages de résolution | 131072 (17-bit) à 8388608 (23-bit) |
Compteur de résolution multi-tours | 16 bits (65536 révolutions) |
Précision de positionnement absolue | < ±50 secondes anguleuses Note: l’exactitude spécifique dépend du moteur et de l’ajustement mécanique d’assemblée |
Répétition positionnement précision | < ±3 secondes angulaires Note: l’exactitude spécifique dépend du moteur et mécanique Ajustement d’assemblée |
Avertissement de panne de tension de batterie | Oui oui |
Interface | RS485 - RS485 |
Fréquence de Communication | ≤ 16 kHz |
Taux de bauds | 2,5 MHz |
Déviations de l’arbre permises | Axial: ± 0,5 mm, Radial: ± 0,02 mm, Angle d’immersion: 0,1 °, extrémité axiale: < 0,1 mm, écoulement Radial: < 0,01 mm |
Vitesses de fonctionnement | Jusqu’à 6000 RPM |
Diamètre de l’arbre | Axe d’un cône ø9 Cône 1:10 |
Moment d’inertie | 0,68 kg·mm² |
Accélération angulaire du Rotor | Pendant l’alimentation d’énergie: ≤80000 rad/ S ²; Lorsque alimenté par batterie: ≤4000 rad/ S ² |
Choc mécanique | Accélération d’impact: 980 m/ S ² pour 11 ms; Impact examiné 3 fois dans chaque direction, totalement 18 fois |
Résistance aux vibrations | 10 à 55Hz, en gardant l’amplitude de 1.5mm L’accélération entre 55 et 2000Hz est de 98m/s2 XYZ 2 heures par direction axiale, 6 heures au total |
Plage de température fonctionnante | -20°C à +105°C |
Humidité Relative | ≤90% (40°C/21 jours, basé sur EN60068-2-78), sans condensation |
Degré de Protection | IP40 - IP40 |

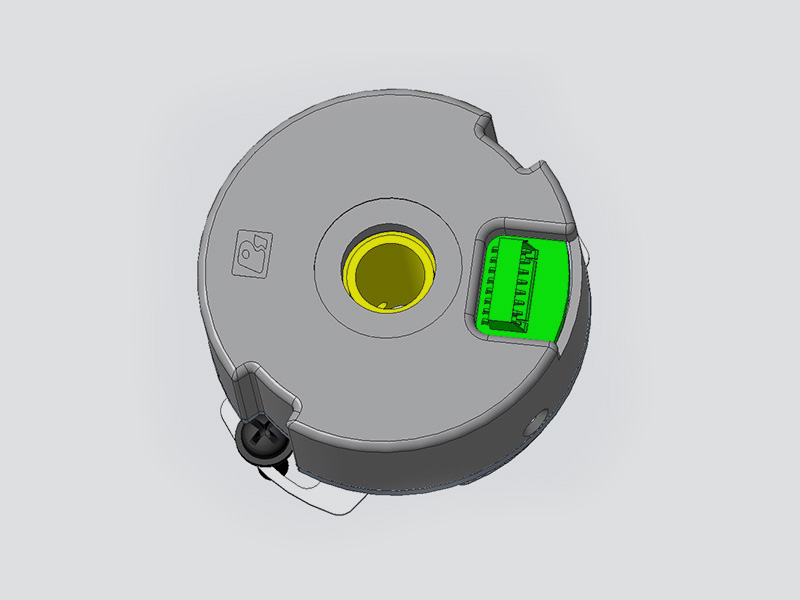
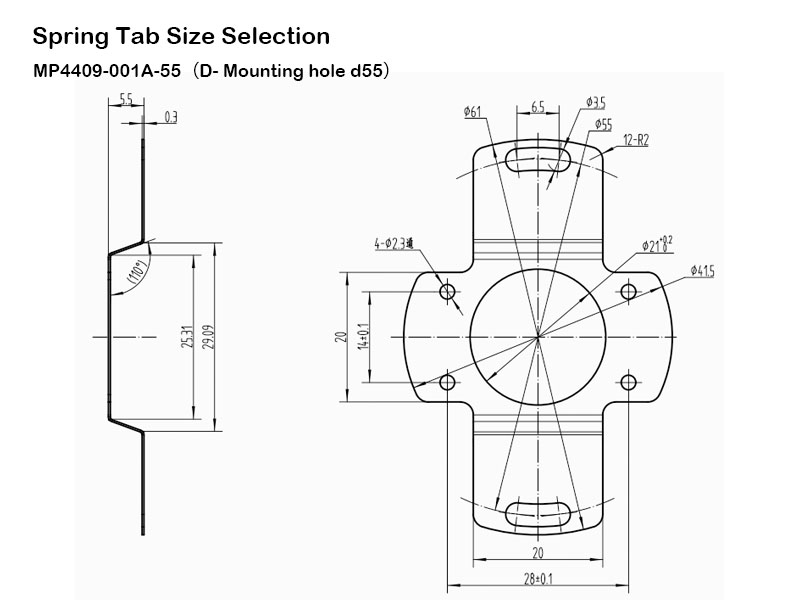
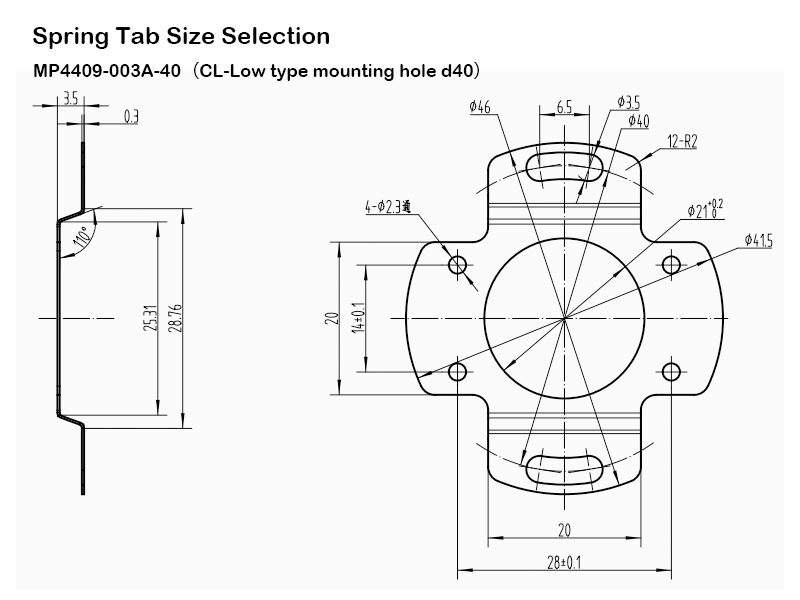
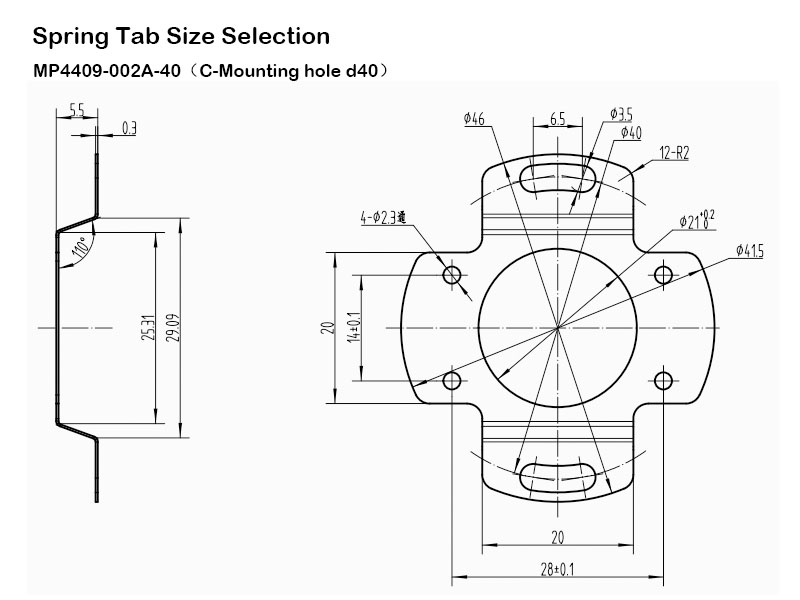
(Note: la languette du ressort doit être sélectionnée en fonction de la taille d’extrémité du moteur.)



| Couleur d’avance | rouge | noir | bleu | jaune | brun | blanc | bouclier |
| Signal | 5V | GND: | 485+ + | 484 × | Batterie + | Batterie GND | P |
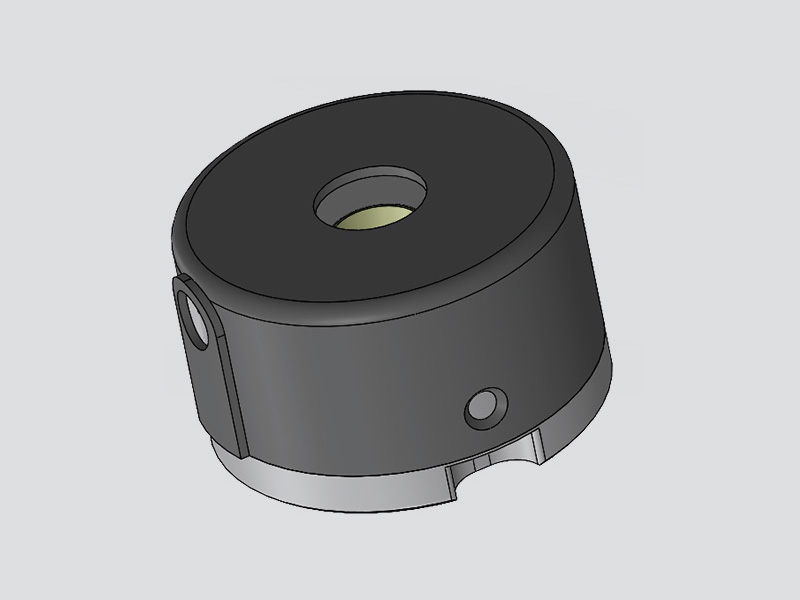
RZL4408A Encodeur absolu Est principalement utilisé pour les systèmes de commande servo-entraînés. Il fournit des informations de rétroaction et des signaux auxiliaires requis par des unités précises de contrôle de position et de vitesse.


| Article: | Description Description | Qté/boîte | boîtes /Carton | G.d. | N ° de catalogue | Qté: /Carton | Taille de paquet |
| RZ44 | Encodeur absolu, diamètre extérieur 44mm | 10pcs | 10 boîtes | 0.8kgs | 0.7kgs | 100pcs | 340*180*47mm |
Découvrez toutes les spécifications techniques en téléchargeant la fiche technique aujourd’hui.
| Numéro de pièce | Interface |
Les Dimensions
(mm) |
Plages de résolution | Compteur de résolution |
La Communication fréquence |
La température fonctionnante |
La Communication fréquence |
Vitesses de fonctionnement |
Protection des données La Structure |
Empreinte 3D | Fiche technique | échantillon |
| RZ35A08 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 |  |
 |
|
| RZ35A09 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06Q | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06S | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4408A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZH4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ4809A | RS485 | Φ48mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| UZ3509 | RS485 | Φ35mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4408 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4409 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4809 | RS485 | Φ48mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| RS972 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RS970 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RF28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RT28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RF20 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RR28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RS5 | / | / | / | Single/Multi-Turn | / | / | / | / | / | |
|
|
| RSG35 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RSU3506 | RS485 | / | 17-24 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| MS Series | / | / | 17 Bits | Single/Multi-Turn | ≤16K | -10℃~105℃ | 16K | ≤6000rpm | / | |
|
|
| RZ44 & RZ48 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RZ1337A | RS485 | / | 25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 12000rpm | IP40 | |
|
|
| RZ7810 | RS485 | / | 23~25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RS Series | RS485 | / | 17~23 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|

Indispensable pour la précision et la fiabilité des équipements médicaux

Améliorer l’automatisation et l’efficacité dans diverses Applications robotiques

Améliorer l’efficacité et la fiabilité des systèmes d’automatisation
Rétroaction précise sur la Position et la vitesse